
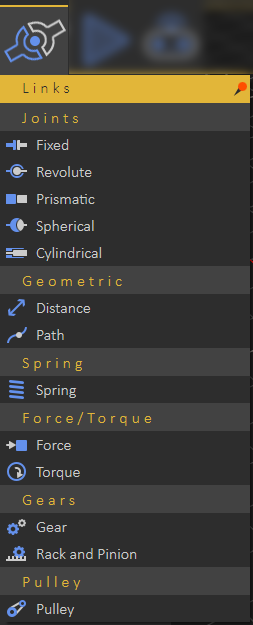
Links Menu
In simulation, the behavior of a solid is governed by two things, the first is the total external forces affecting it, and the second is the link that defines the relationship between it and another different solid acts as constraint that are enforced by.
Joints Group
Geometric Group
Spring Group
Force/Torque Group
Gears Group
Pulley Group
Ground always exist in simulation although it isn't visible to the user.
The Lock Icon is different in simulation. Locking an object makes it invulnerable against any external force.
In SimLab Composer, every simulation case requires creating solids but creating Links is optional (it depends on the nature of the simulation). A Link defines the relationship of two solids to each other. Consider these prerequisites when you start every simulation project.
The simulation process is very conservative!
Before building a simulation, make sure that it is satisfactory and complete and does not require modifications outside the Simulation Workbench.
Joints Group
A joint is something like a hinge, which is used to connect two solids. It is a relationship that is enforced
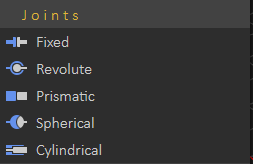
between two bodies so that they can only have certain positions and orientations relative to each other. To create a joint between two solids, choose the joint type from the Links Menu, the joint will be added to the Links Tree, and its properties will appear in the Properties Panel on the left.
- Fixed: maintains a fixed relative position and orientation between two solids, in practice, using this joint is rare. If two bodies are needed to be glued together, it is better to represent them as a single solid when deciding that both of the solids hold the same properties during the simulation session.
- Revolute: also called pin joint, is a one-degree-of-freedom kinematics pair used in mechanisms. Revolute joints provide single-axis rotation function used in many places such as door hinges, folding mechanisms, and other uni-axial rotation devices.
- Prismatic: also called slider joint, provides a linear sliding movement between two bodies. The two joined solids have their rotation held fixed relative to each other, and they can only move along a specified axis, chosen by the user while specifying the joint properties.
- Spherical: also called a ball and socket joint, is a joint in which the ball-shaped surface of a solid fits into the cup-like indentation of another solid. This type of joint allows the solid to move in a 360 degree angle—with more freedom than other joints.
- Cylindrical: a two-degrees-of-freedom kinematics pair used in mechanisms. Cylindrical joints provide single-axis sliding function as well as a single axis rotation, providing a way for two rigid bodies to translate and rotate freely.
A selected Joint requires its properties to be set in order to work appropriately.